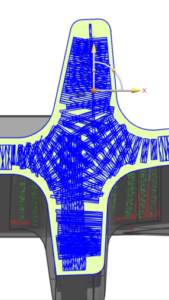
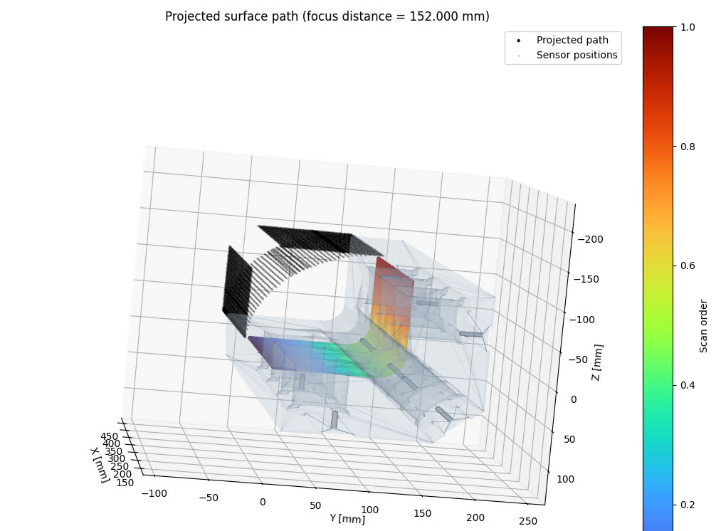
As part of the SeConRob project, a simulation tool developed by Otto Fuchs KG is being used that is capable of analyzing the volume coverage during ultrasonic testing. In ultrasonic testing, it is necessary to ensure that the entire component volume (at least the volume of the finished part) is fully covered. Otto Fuchs KG has developed a tool for this purpose that fully automatically analyzes the robot’s trajectories using a simulated sound field. In this process, a theoretical sound field is superimposed on the robot’s planned inspection paths and projected onto the component volume. The tool is capable of calculating the volume fraction that is captured by the sound field with the required sensitivity. This provides information about the quality of the inspection. If uninspected areas are identified, the trajectories must be adjusted to guarantee 100% coverage of the finished part’s volume. In this process, so-called “dead zones” are taken into account, and a consistently perpendicular sound incidence is assumed. The next step is to implement a real sound field (divergence angle) into the calculations. The output is provided graphically and as a calculated numerical value. Uncovered areas can be displayed separately, allowing the scan paths to be optimized.
